L’algoritmo quicksort (ordinamento veloce) è un algoritmo ricorsivo che adotta una tecnica algoritmica detta Divide et Impera.
Nonostante il costo nel caso peggiore sia Θ(n) (ovvero costo O(n)) è spesso la soluzione migliore per grandi valori di n perché:
Ha un tempo di esecuzione atteso di O(nlogn)
I fattori costanti nascosti sono molto piccoli
permette ordinamento “in loco”
Info
Riunisce i vantaggi del Selection sort (ordinamento in loco) e del Merge sort (ridotto tempo di esecuzione). Ha però lo svantaggio dell’elevato costo computazionale nel caso peggiore.
Funzionamento Generale
Funzionamento Generale
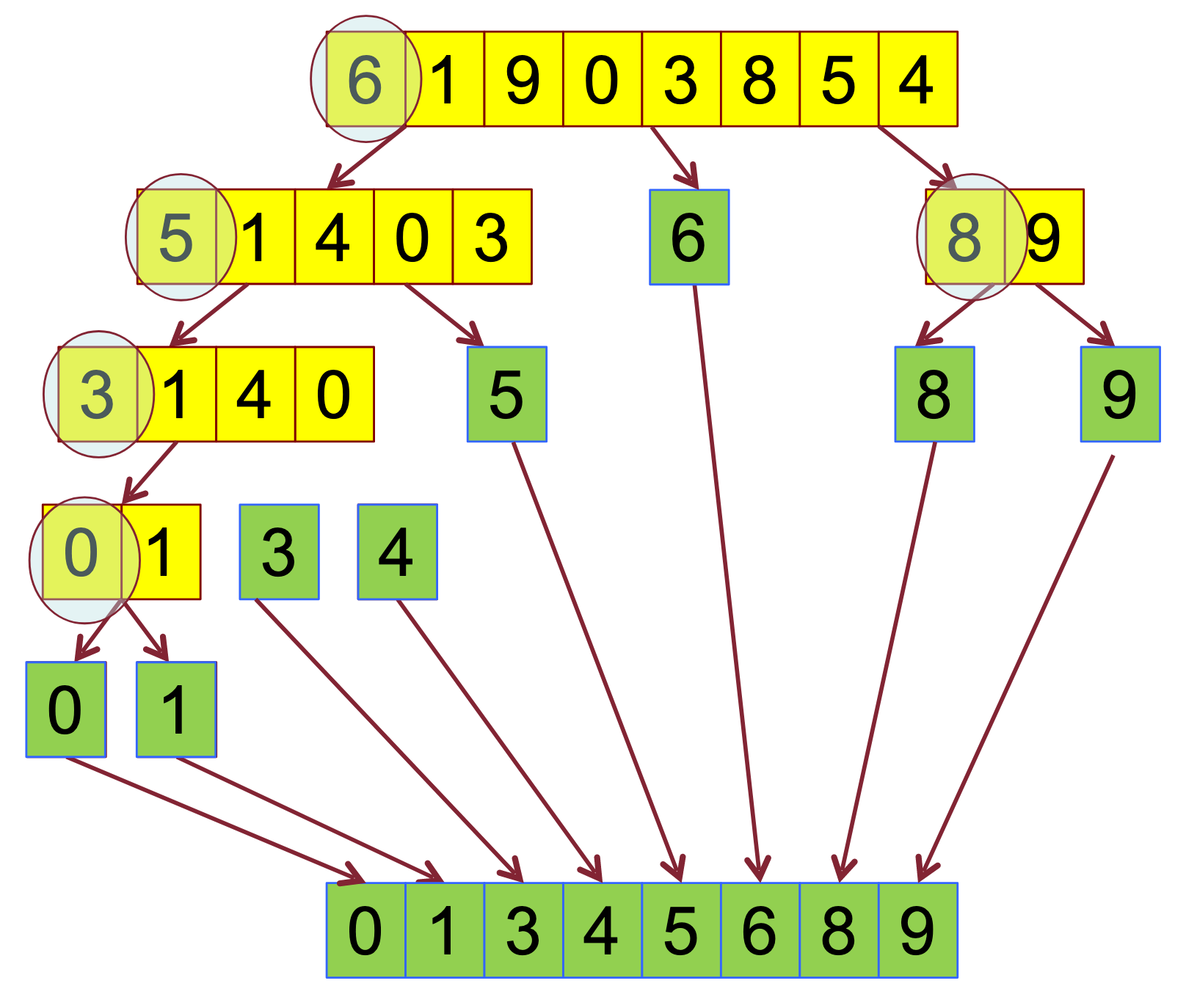
L’approccio dell’algoritmo Quick Sort è il seguente:
Divide: Si seleziona un pivot posizionato in modo da ottenere due sotto sequenze:
Elementi minori o uguali al pivot,
Elementi maggiori al pivot
Impera: Le due sotto sequenza vengono ordinate ricorsivamente
Passo base: La ricorsione procede fino a quando le sotto sequenze sono costituite da un solo elemento che è ovviamente ordinato.
Combina: non occorre.
Implementazione Base
Codice
def QuickSort(A): # Se la lista è vuota o ha un solo elemento, è già ordinata if len(A)<=1: return A pivot = A[0] # Sceglie il primo elemento come pivot left, middle, right = [], [], [] # Crea tre liste vuote for x in A: # Per ogni elemento in A # Se è minore del pivot, va a sinistra if x < pivot: left.append(x) # Se è uguale al pivot, va al centro elif x == pivot: middle.append(x) # Se è maggiore del pivot, va a destra else: right.append(x) # Ordina left e right, e le concatena con middle return QuickSort(left) + middle + QuickSort(right)
Non è una soluzione perfetta perché non è in loco e non sceglie il pivot
Costo Temporale
T(n)={T(k)+T(n−∣middle∣−k)+Θ(n)Θ(1)se n≥2se n<2
dove k è 0<k<n−∣middle∣
Costo spaziale
S(n)=O(n2)
Alto costo spaziale dovuto alla creazione di liste di appoggio
Versione in loco
Codice
def QuickSort(A, low ,high): if low < high: # Se la porzione da ordinare ha più di un elemento # Riorganizza la porzione e ottiene l'indice del p = Partition(A, low, high) pivot # Ordina la porzione a sinistra del pivot QuickSort(A, low, p-1) # Ordina la porzione a destra del pivot QuickSort(A, p, high)
Funzionamento
Prende tre parametri:
Una lista A da ordinare
Due indici low e high indicano l’inizio e la fine della porzione di A da ordinare
Se low è minore di high, chiama una funzione Partition (non mostrata qui) che riorganizza la porzione di A da low a high in modo che tutti gli elementi minori di un certo pivot vengano prima del pivot e tutti gli elementi maggiori vengano dopo. La funzione Partition restituisce l’indice del pivot.
Chiama ricorsivamente QuickSort su due porzioni di A: da low a p-1 e da p a high. Questo ordina le due porzioni di A da entrambi i lati del pivot.
Costo Temporale
T(n)={T(k)+T(n−1−k)+Θ(n)Θ(1)se n≥2se n<2
dove k è 0<k<n
Leggi Costo Temporale per approfondire i costi temporali del quicksort
Costo Spaziale
Ha un costo spaziale costante, ovvero O(1), perché non utilizza spazio di memoria aggiuntivo proporzionale alla dimensione dell’input.
Infatti modifica “in loco” la lista originale ovvero esegue le modifiche direttamente sulla struttura dati di input, senza creare nuove copie o utilizzare spazio di memoria aggiuntivo significativo.
Partition
Codice
def Partition(A, low, high): pivot = A[low] pivot_index = low + 1 # Scambia gli elementi che sono minori del pivot for current_index in range(low + 1, high + 1): if A[current_index] < pivot: A[current_index], A[pivot_index] = A[pivot_index], A[current_index] pivot_index += 1 # Posiziona il pivot al suo posto definitivo A[low], A[pivot_index - 1] = A[pivot_index - 1], A[low] return pivot_index - 1
Funzionamento
La funzione Partition è una componente chiave dell’algoritmo di ordinamento QuickSort. Prende in input un array A e due indici, low e high, e riorganizza l’array in modo che tutti gli elementi minori di un elemento pivot siano a sinistra del pivot e tutti gli elementi maggiori siano a destra. Il pivot è l’elemento in posizione low.
Ecco come funziona:
Input: L’array A da riorganizzare, e due indici low e high che definiscono la porzione dell’array su cui operare.
Impostazione del pivot: Il pivot viene impostato come l’elemento in posizione low.
Scansione dell’array: La funzione scorre l’array dall’indice low + 1 a high. Per ogni elemento, se è minore del pivot, lo scambia con l’elemento in posizione i e incrementa i.
Posizionamento del pivot: Alla fine della scansione, il pivot viene scambiato con l’elemento in posizione i - 1. Questo posiziona il pivot al suo posto definitivo nell’array ordinato.
Output: La funzione restituisce i - 1, che è l’indice del pivot nell’array.
oss pivot_index è un indice che tiene traccia della posizione in cui il pivot dovrebbe essere posizionato nell'array. Inizialmente, è impostato come low + 1, che è l'elemento successivo al pivot nell'array.
La variabile
Durante l’esecuzione del ciclo for, ogni volta che si trova un elemento che è minore del pivot, questo elemento viene scambiato con l’elemento alla posizione pivot_index, e poi pivot_index viene incrementato di 1. Questo assicura che tutti gli elementi a sinistra di pivot_index siano minori del pivot.
In pratica, la funzione Partition divide l’array in due parti: una con gli elementi minori del pivot e una con gli elementi maggiori o uguali al pivot. Questo è un passo fondamentale nell’algoritmo QuickSort, che funziona dividendo ripetutamente l’array in questo modo fino a quando ogni porzione è ordinata.
Costo Temporale
La complessità di PartitionΘ(n) in quanto il costo dipende dal numero di passi effettuati dal ciclo ovvero n.
Costo Spaziale
La funzione Partition ha un costo spaziale costante, ovvero O(1), perché non utilizza spazio di memoria aggiuntivo proporzionale alla dimensione dell’input.
Infatti modifica “in loco” la lista originale ovvero esegue le modifiche direttamente sulla struttura dati di input, senza creare nuove copie o utilizzare spazio di memoria aggiuntivo significativo.
Costo Temporale
Caso Peggiore:
O(n2)
It occurs when the pivot element picked is either the greatest or the smallest element.
oss
This condition leads to the case in which the pivot element lies in an extreme end of the sorted array. One sub-array is always empty and another sub-array contains n - 1 elements. Thus, quick-sort is called only on this sub-array.
Caso Migliore:
Ω(n⋅logn)
It occurs when the pivot element is always the middle element or near to the middle element.